2023
Detailed Extraction of Roadside Trees from MLS Point Cloud
Guided by Professor Bisheng Yang and Zhen Dong from Wuhan University
2023.06 - 2023.10
As one of the core developers. We proposed a confidence-guided roadside tree extraction algorithm. The core idea is to first segment pole-like objects and calculate their confidence of being trees, then classify these pole-like targets into trees and non-trees. Next, we use a combination of weighted distance constraints and an allometric model to extract individual trees using the optimized minimum cut method. Based on the extraction results of individual trees, we estimate tree parameters and ultimately obtain 3D tree models through 3D modeling techniques.
2022
Point2Models Software Development
Guided by Professor Bisheng Yang and Zhen Dong from Wuhan University
2022.09 - 2023.09
As one of the developers and algorithm maintainers, I developed and maintained urban MLS point cloud object extraction algorithms, point cloud coordinate transformation and projection algorithms, and DEM processing algorithms.
2020

GIS Software Tutorial Writing Team
Guided by Associate Professor Yuejin Deng from Wuhan University
2020.09 - 2021.08
As a team member, I studied and organized 3D visualization materials related to Cesium and was responsible for writing the book titled '3D Visualization Development Guide Based on Cesium.'
Visual Localization and Navigation Methods for Quadruped Robot Platforms
Guided by Professor Chi Guo from Wuhan University
2020.04 - 2021.10 National Undergraduate Training Program for Innovation and Entrepreneurship (No. 202010486087)
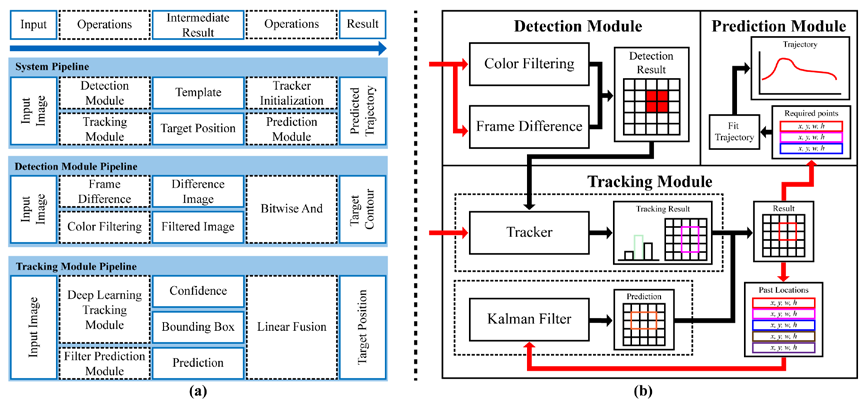
As a core researcher and developer, I was primarily responsible for the implementation and integration of visual SLAM (Simultaneous Localization and Mapping) algorithms, while also contributing to the research on a binocular vision-based system for object detection, tracking, and trajectory prediction.