I am currently a third-year M.S. student at LIESMARS, Wuhan University, under the supervision of Prof. Zhen Dong and Prof. Bisheng Yang. Before this, I received the B.S. degree from the School of Geodesy and Geomatics, Wuhan University, in 2022.
My research interests include 3D scene understanding, point cloud processing, and their applications in digital twin cities and intelligent transportation systems.
Action required
Problem: The current root path of this site is "baseurl ("_config.yml.
Solution: Please set the
baseurl in _config.yml to "Education
-
 LIESMARS, Wuhan UniversityM.S. in Photogrammetry and Remote SensingSep. 2022 - Now
LIESMARS, Wuhan UniversityM.S. in Photogrammetry and Remote SensingSep. 2022 - Now -
SGG, Wuhan UniversityB.S. in Geodesy and Geomatics EngineeringSep. 2018 - Jun. 2022
Honors & Awards
-
First Prize Scholarship (Top 5%), Wuhan University, Three Times2024, 2023, 2019
-
Outstanding Graduate Student (Top 10%), Wuhan University2024, 2023
-
The Best Paper Award (Top 10) at the 7th National LiDAR Conference2023
-
Grand Prize (Ranking 1st) in Data Processing Competition of the 7th National LiDAR Conference2023
-
2nd Place Award in 3D Semantic Segmentation to the Open World (3DOW) Challenge, IROS2022
-
Outstanding Graduates (Top 5%), Wuhan University2022
-
Merit Student (Top 10%), Wuhan University2019
-
Hi-Target Special Scholarship (Top 10%), Wuhan University2019
-
Outstanding Student (Top 20%), Wuhan University, Twice2021, 2020
-
Second Prize Scholarship (Top 20%), Wuhan University2020
-
Second Prize in MathorCup College Mathematical Modeling Challenge2021
-
National Second Prize in the Chinese Mathematics Competitions2019
-
Excellent Student Cadre, Wuhan University2019
-
Advanced Individual of Social Work, Wuhan University2019
-
Outstanding Volunteer, Wuhan University2019
-
First Prize for Outstanding Achievements in Volunteer Service, Wuhan University2019
Selected Publications (view all )
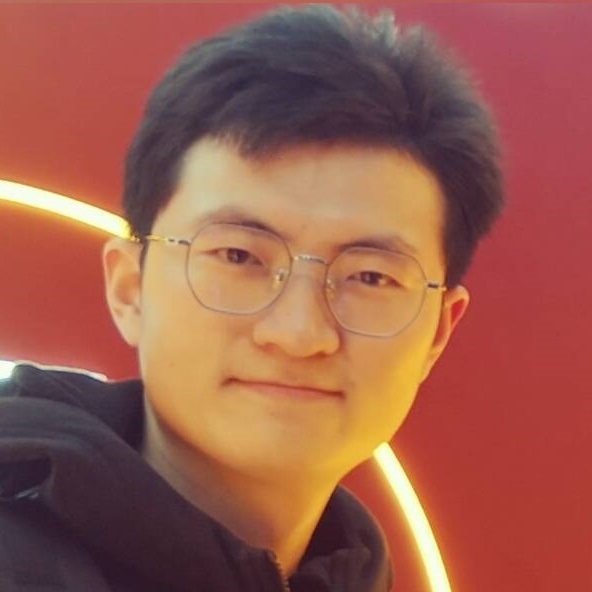
Cross-modal semantic transfer for point cloud semantic segmentation
Zhen Cao*, Xiaoxin Mi*, Bo Qiu, Zhipeng Cao, Chen Long, Xinrui Yan, Chao Zheng, Zhen Dong†, Bisheng Yang (* equal contribution)
ISPRS Journal of Photogrammetry and Remote Sensing (SCI, JCR Q1, IF=12.7, TOP Journal in Geosciences) 2025
This study introduces a superpoint-assisted Neural Radiance Field (NeRF) for point cloud semantic segmentation without requiring additional training data. For a given scene, the proposed method uses point clouds, associated images, and image pseudo-semantic labels as inputs to achieve pointwise semantic segmentation.
Ubiquitous Point Cloud: Theory, Model, and Applications (1st ed.)
Bisheng Yang, Zhen Dong, Fuxun Liang, Xiaoxin Mi, et al.
CRC Press 2024
This book provides the latest theory and methodology for point cloud processing with Al to better serve earth observation, 3D vision, autonomous driving, smart city, and geospatial information applications. (I was responsible for writing Chapter 7 of this book, titled Point Cloud Semantic Segmentation.)
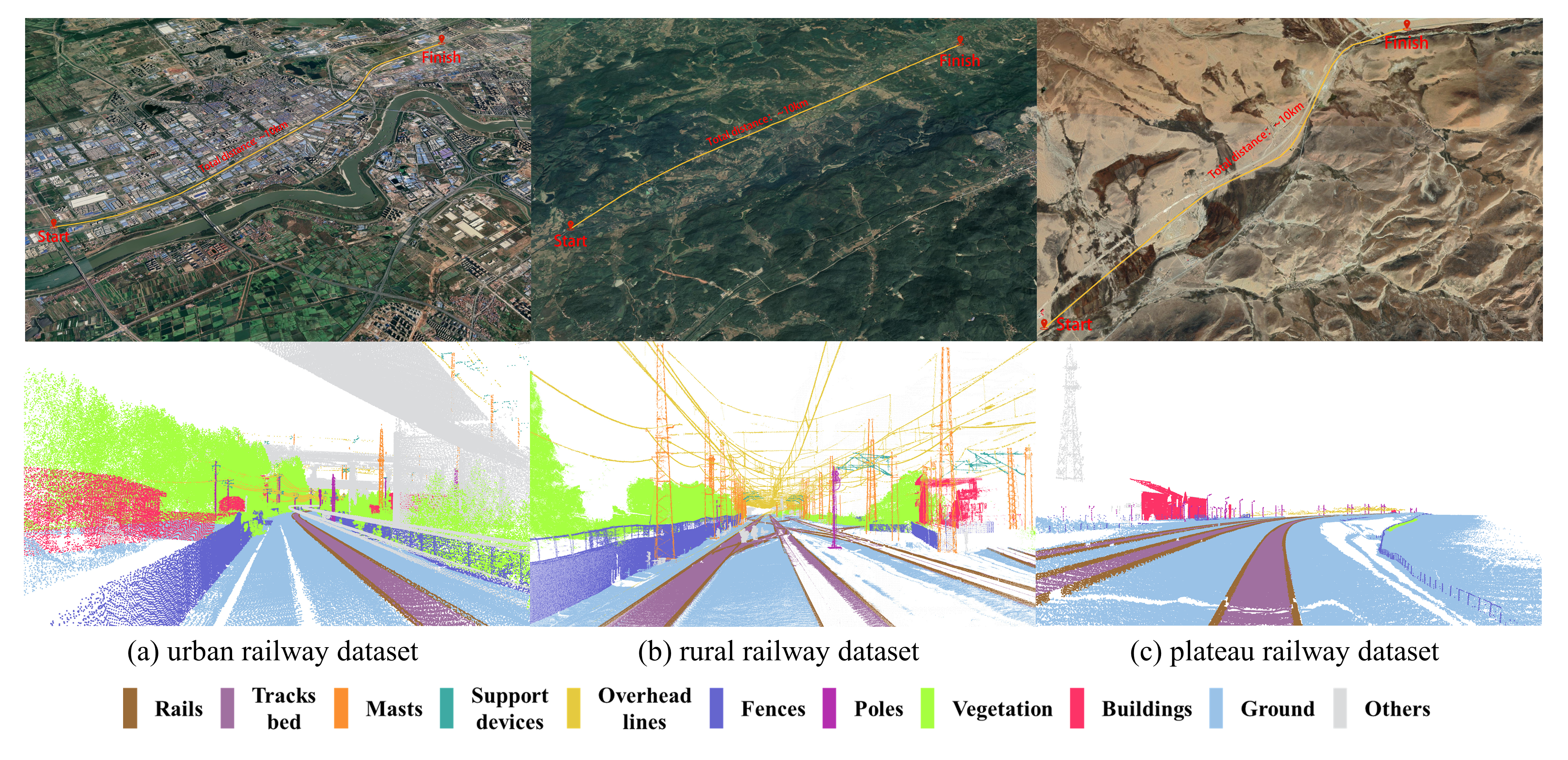
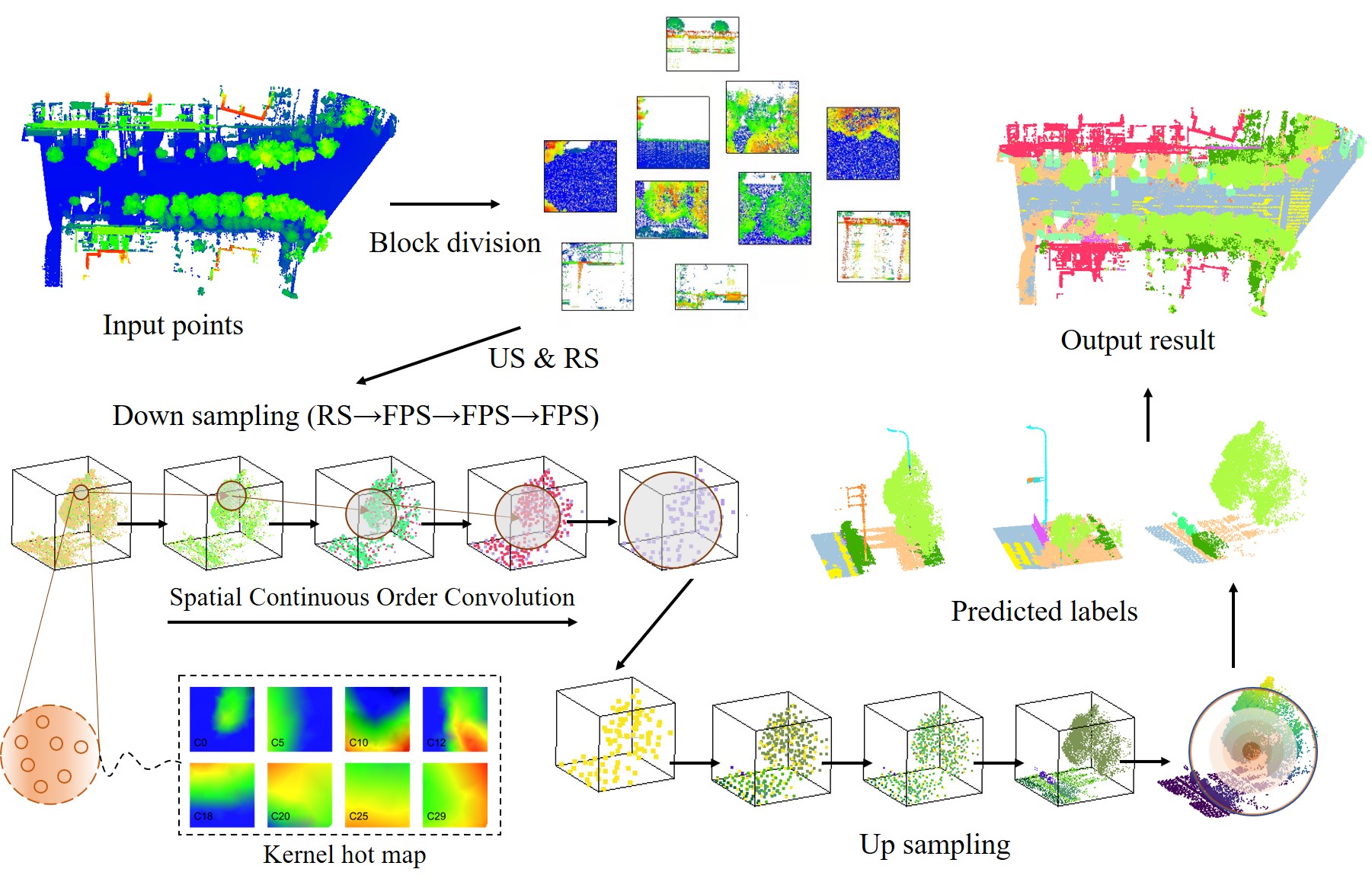
WHU-Railway3D: A Diverse Dataset and Benchmark for Railway Point Cloud Semantic Segmentation
Bo Qiu*, Yuzhou Zhou*, Lei Dai, Bing Wang, Jianping Li, Zhen Dong†, Chenglu Wen, Zhiliang Ma, Bisheng Yang (* equal contribution)
IEEE TITS (In Press, SCI, JCR Q1, IF=7.9, TOP Journal in Engineering Technology) 2024
This paper introduces WHU-Railway3D, a diverse point cloud semantic segmentation (PCSS) dataset specifically tailored for railway scenes. Spanning approximately 30 km and comprising 4.6 billion points, the dataset includes 11 richly annotated categories across urban, rural, and plateau railway environments.

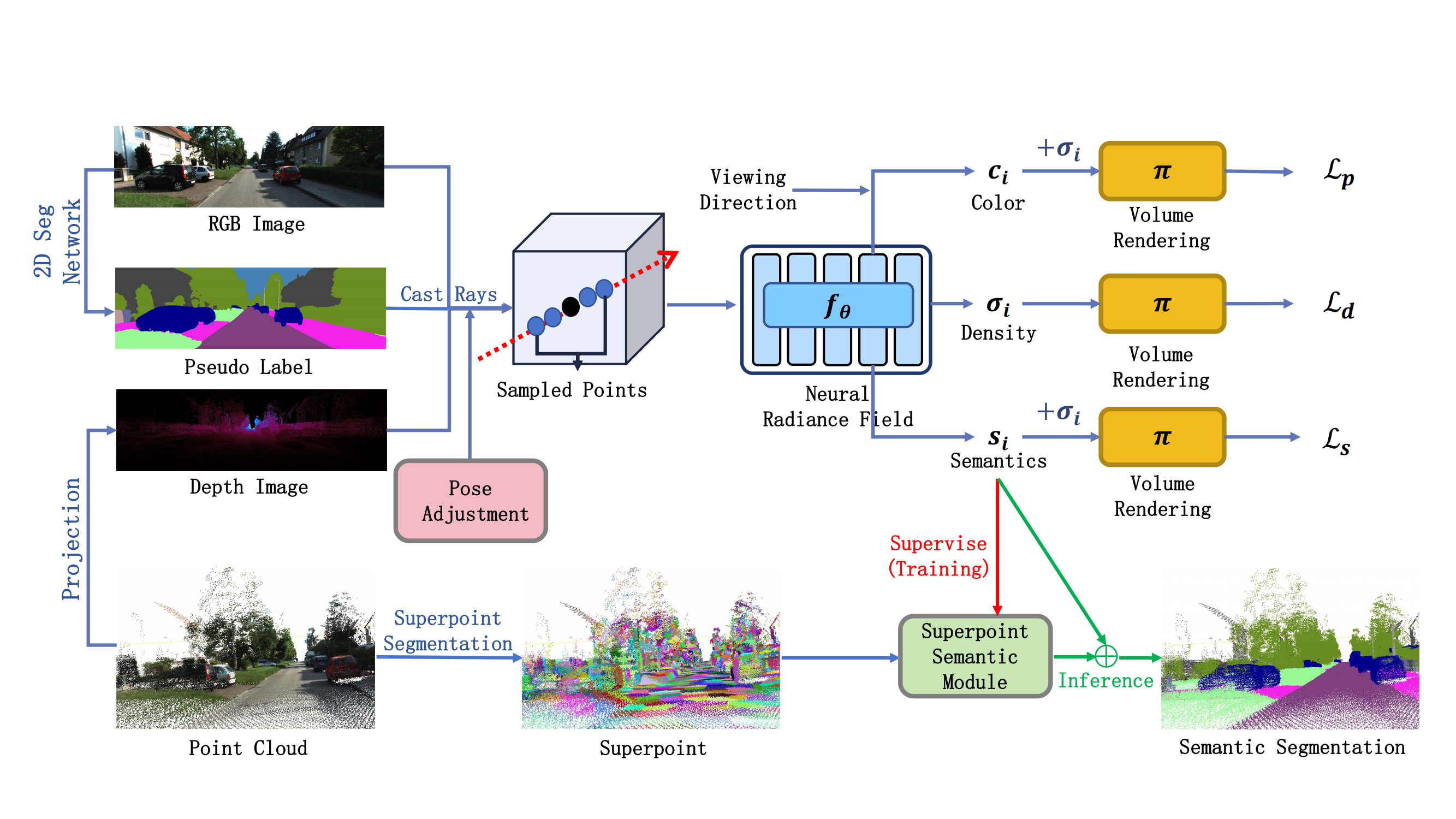
RailSeg: Learning Local–Global Feature Aggregation With Contextual Information for Railway Point Cloud Semantic Segmentation
Tengping Jiang, Bisheng Yang†, Yongjun Wang†, Lei Dai, Bo Qiu, Shan Liu, Shiwei Li, Qinyu Zhang, Xin Jin, Wenjun Zeng
IEEE TGRS (SCI, JCR Q1, IF=7.5) 2023
This study introduces RailSeg, a deep learning framework for railway point cloud semantic segmentation, focusing on point cloud downsampling, integrated local–global feature extraction, spatial context aggregation, and semantic regularization.
All publications
Selected Projects (view all )
Detailed Extraction of Roadside Trees from MLS Point Cloud
Guided by Professor Bisheng Yang and Zhen Dong from Wuhan University
2023.06 - 2023.10
As one of the core developers. We proposed a confidence-guided roadside tree extraction algorithm. The core idea is to first segment pole-like objects and calculate their confidence of being trees, then classify these pole-like targets into trees and non-trees. Next, we use a combination of weighted distance constraints and an allometric model to extract individual trees using the optimized minimum cut method. Based on the extraction results of individual trees, we estimate tree parameters and ultimately obtain 3D tree models through 3D modeling techniques.
Point2Models Software Development
Guided by Professor Bisheng Yang and Zhen Dong from Wuhan University
2022.09 - 2023.09
As one of the developers and algorithm maintainers, I developed and maintained urban MLS point cloud object extraction algorithms, point cloud coordinate transformation and projection algorithms, and DEM processing algorithms.

GIS Software Tutorial Writing Team
Guided by Associate Professor Yuejin Deng from Wuhan University
2020.09 - 2021.08
As a team member, I studied and organized 3D visualization materials related to Cesium and was responsible for writing the book titled '3D Visualization Development Guide Based on Cesium.'
Visual Localization and Navigation Methods for Quadruped Robot Platforms
Guided by Professor Chi Guo from Wuhan University
2020.04 - 2021.10 National Undergraduate Training Program for Innovation and Entrepreneurship (No. 202010486087)
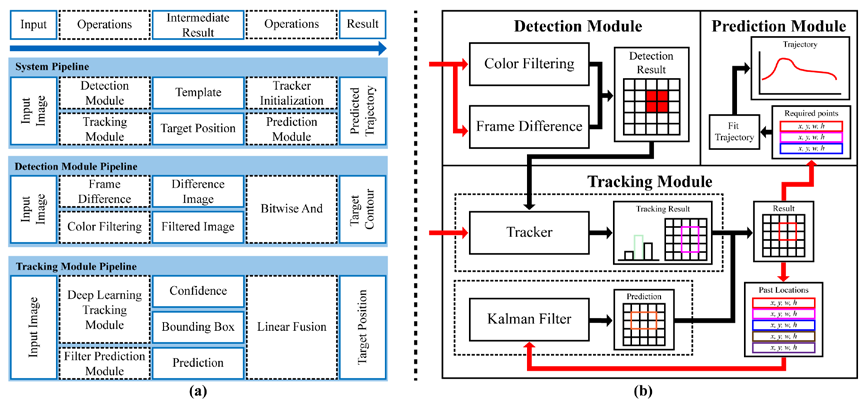
As a core researcher and developer, I was primarily responsible for the implementation and integration of visual SLAM (Simultaneous Localization and Mapping) algorithms, while also contributing to the research on a binocular vision-based system for object detection, tracking, and trajectory prediction.